Make sure you have followed the steps in the Hardware Setup guide to get your connections right.
Follow the steps in the Environment Setup guide to get your software platform ready to run samples. If you are working with M210 and want the Advanced Sensing features, please also follow the M210 Onboard Computer Checklist to install extra dependencies.
Clone (or download as zip) the DJI OSDK from Github here.
Open a terminal, cd into the onboardsdk folder and follow these steps to build the OSDK:
mkdir build cd build cmake .. make
If you want the Advanced Sensing features for the M210, replace cmake .. with cmake .. -DADVANCED_SENSING=ON in the above commands. For Waypoint mission V2, please add -DWAYPT2_CORE=ON.
The above step builds the osdk-core library, as well as the Linux samples. Executables are located inside the build/bin folder.
Configuration
Still inside the build folder, copy the default user config file to your executable location:
cp ../sample/linux/common/UserConfig.txt bin/
Open the UserConfig.txt file in a text editor and fill in your App ID, Key, Baudrate and Port name in the designated places.
Running the Samples
Run your desired Linux sample (e.g. flight control sample) with the following command:
cd bin ./djiosdk-flightcontrol-sample UserConfig.txt
Follow the interactive prompt to execute actions available in the sample.
ROS Onboard Computer
Building the ROS Nodes
If you don't have a catkin workspace, create one as follows:
mkdir catkin_ws cd catkin_ws mkdir src cd src catkin_init_workspace
Clone (or download as zip) the DJI OSDK-ROS from Github here in the src folder.
Build the dji_sdk ROS package and the dji_sdk_demo ROS package.
cd .. catkin_make
Configuration
Remember to source your setup.bash:
source devel/setup.bash
Edit the launch file and enter your App ID, Key, Baudrate and Port name in the designated places:
rosed dji_sdk sdk.launch
Running the Samples
Start up the dji_sdk ROS node:
roslaunch dji_sdk sdk.launch
Open up another terminal and cd to your catkin_ws location, and start up a sample (e.g. flight control sample):
Follow the prompt on screen to choose an action for the drone to do.
STM32 Onboard Computer
Installing and Setting up the OSDK
Clone (or download as zip) the DJI OSDK from Github here.
Open the project located in sample/STM32/OnBoardSDK_STM32/Project/OnBoardSDK_STM32.uvprojx in Keil uVision IDE.
To build the code, developers need to input the correct APP KEY and APP ID obtained from DJI Developer site in OnboardSDK_STM32/User/Activate.cpp file.
Building and Running the Samples
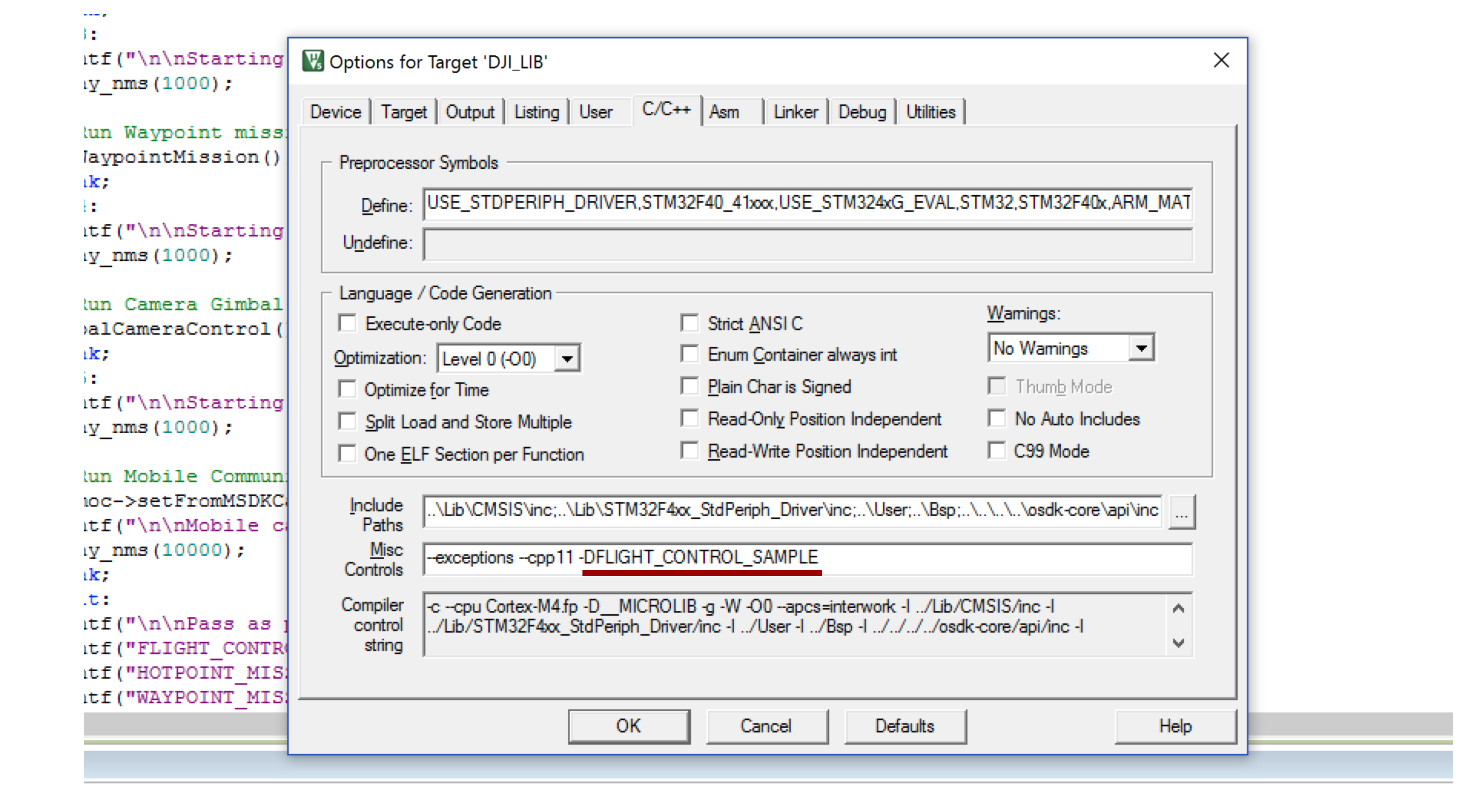
To choose which sample to run, you need to pass a preprocessor flag using Keil. See the image to find the location (underlined in red) you need to edit:
Use the menu item Project->Build Target and Flash->Download to build the project and flash to the STM32 board.
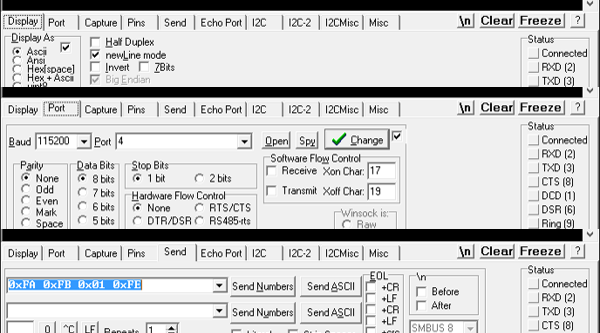
Set the baud rate of your serial terminal software (here we use the open-source RealTerm ) to be 115200, which is the one we use to configure USART2 in the example App. Configure the serial terminal to display the received information in Ascii mode.
QT
Project Setup
In Qt Creator, click on the Open Project button, and navigate to the sample/Qt/djiosdk-qt-sample/ directory. Select the djiosdk-qt-sample.pro file.
In the Configure Project dialog box, select the appropriate compiler and Qt version and click Configure Project.
Next, click on the Projects tab in the left-hand panel and select the Run settings under the Build and Run heading on the left.
Check the Run in Terminal checkbox. On Linux, you might need to direct Qt Creator to the pre-installed XTerm terminal rather than gnome-terminal; go to Tools->Options->System and change the path in the Terminal box to /usr/bin/xterm -e.
Following these steps, your project should be set up correctly. You can choose to enter your App ID and Key in the UserConfig.txt file in the root of the folder to avoid entering it each time inside the application.
Running the Application
Click the Run or Debug button in the bottom left corner to start up the application.
The startup screen should look like this:
First, select the serial port and hit the Initialize Vehicle button. This sets up the Vehicle object, initializes all components and reads App ID and Key from the UserConfig.txt file.
Next, you must activate the drone and optionally obtain control.
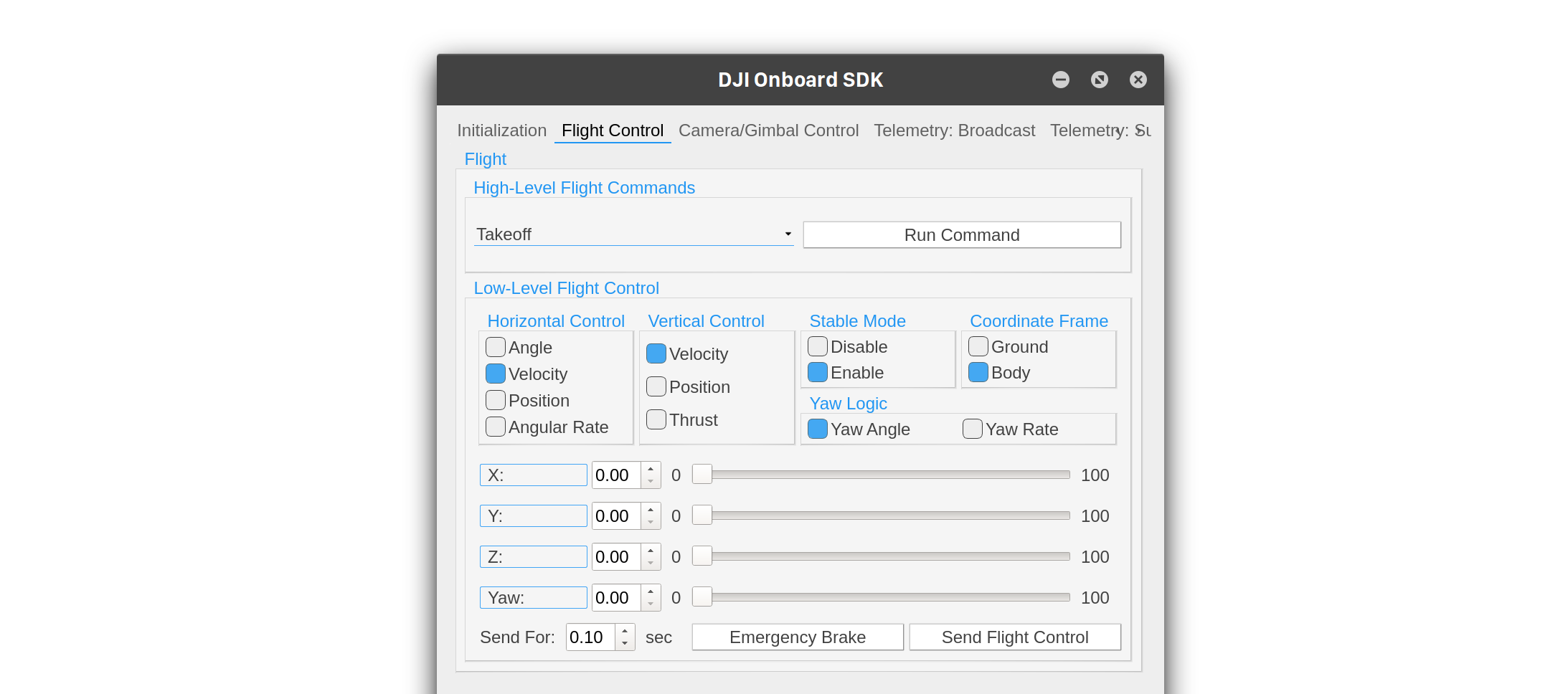
From here on, explore the various components by clikcing on the tabs at the top. For example, here is a screenshot of the Flight Control page:
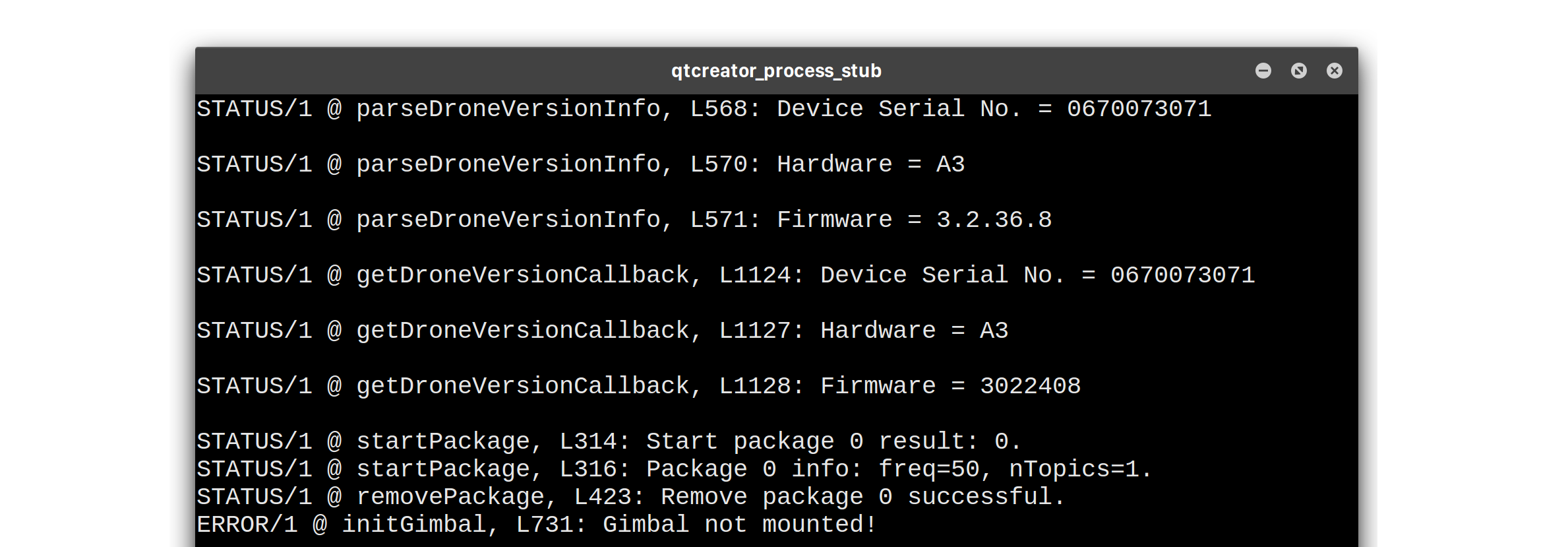
The terminal is your source of debug and status information; here is a screenshot of what that looks like.
If you are using XTerm on a HiDPI display, the fonts might be too small to read. In that case, hold down the Ctrl key and Right-click with a mouse on the XTerm window, and select TrueType Fonts.


 Following these steps, your project should be set up correctly. You can choose to enter your App ID and Key in the
Following these steps, your project should be set up correctly. You can choose to enter your App ID and Key in the  Following these steps, your project should be set up correctly. You can choose to enter your App ID and Key in the
Following these steps, your project should be set up correctly. You can choose to enter your App ID and Key in the