Advanced Sensing - Stereo Images sample
Introduction
The Advanced Sensing - Stereo Image sample demonstrates how to subscribe and unsubscribe images and to provide a custom callback function to display them. The CMakeLists of this sample will detect if developers have OpenCV installed in their system. If they do, the sample callback function will display the images.
For ROS developers, please use ROS services to subscribe the images and image_view to display them.
To build the samples, follow the steps in Sample Setup to build with Advanced Sensing support.
Workflow
Two samples are provided here for different use cases. In both samples, the main thread creates a vehicle object with one extra argument to enable this feature and calls an API to subscribe to the images depending on user's input. The Advanced Sensing feature has a dedicated reading thread to receive image data from the aircraft, developers will be able to access these data by passing a callback function. If developers would like to perform intense computation on the image data, it is suggested to create a separate processing thread to avoid interference with the reading thread.
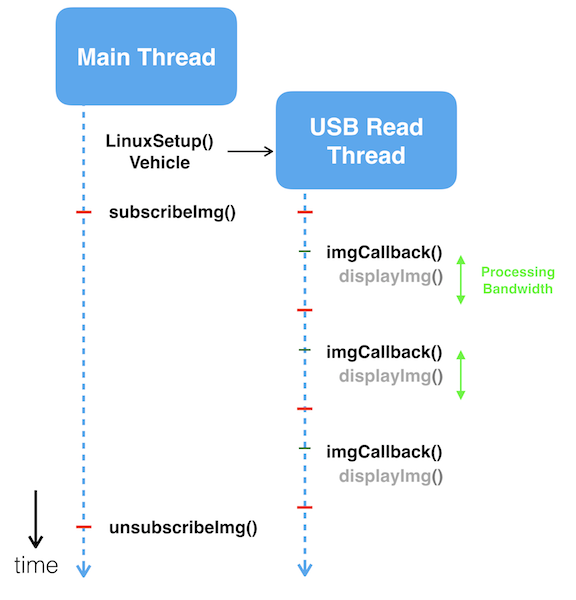
Sample 1 Image Reading and Processing on the Same Thread
In this sample, one thread is instantiated to read image data from USB and one callback function is registered to the subscription API. This callback function will be invoked whenever image data is received from the reading thread. Depending on how many camera and the resolution and frequency of the image subscribed, the USB reading might occupied most of the bandwidth and remain little time for processing. Check out below table for benchmark result and refer to Sample #2 if you experience drop frame issue.
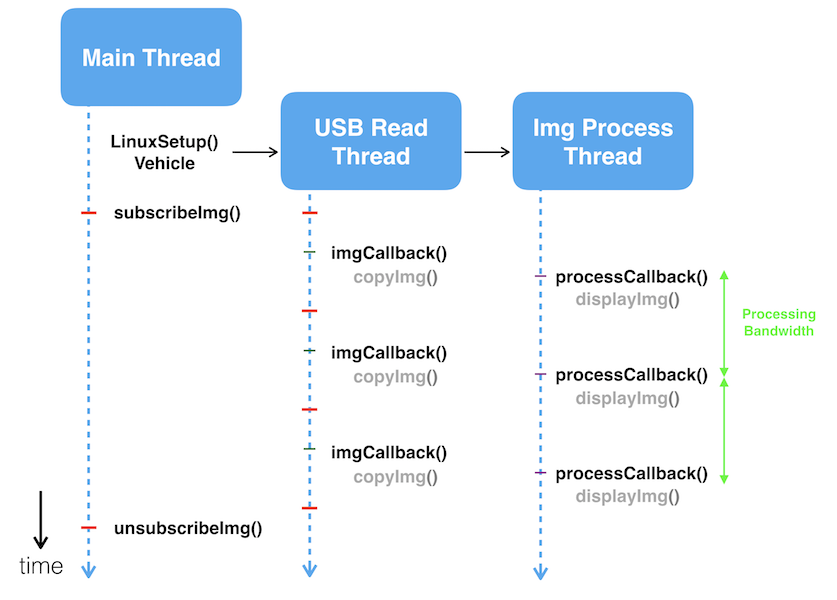
Sample 2 Image Reading and Processing on Different Threads
In the second sample, two threads are instantiated to read and to process images.
A class ImageProcessContainer is provided to store images on the reading
thread and to process them on processing thread.
Two callback functions are registered for these two purposes.
As shown below, an image callback is invoked whenever data is transferred from USB
to the onboard computer and a processing callback is invoked whenever image
data is copied. This extra thread provides more bandwidth to process the images.
Output
As shown below, an onboard computer is attached to M210 running this sample. Stereo images from both forward and downward stereo camera pairs are collected in QVGA resolution (240p) at 20 fps.
Appendix. Benchmark Result of Libusb Reading Time
Depending on the resolution and the frequency of the images subscribed, the data flow could vary from 1.5 MB/s to 12 MB/s. This section presents a benchmark result of the libusb reading time when developer subscribes to front VGA images at 20 fps (12 MB/s) on different computing platforms.
Developers could use this table to decide whether multiple threads are required for their applications. For example, developer subscribing to front VGA images at 20 fps on a DJI Manifold has roughly 15.31 ms (50-34.69) to process the image without dropping a frame in a single-thread framework.
| Intel i7 | DJI Manifold | Nvidia TX2 with JetPack OS |
Nvidia TX1 with JetPack OS |
|
|---|---|---|---|---|
| Libusb read 2 x VGA images @ 20 fps (unit: ms) |
36.96±1.06 | 34.69±1.27 | 42.18±2.47 | 41.69±2.74 |