Waypoint Mission V2 sample (beta)
Introduction
The Missions sample shows example usage of GPS Waypoint missions V2 on M210 V2.
Goals
The sample intends to show end-to-end implementation of a complete GPS waypoint missions V2. It upload 7 waypoints to complete a polygon with 6 sides. Then it asks user to mix and match actuators and triggers to upload actions.
The Missions sample is available on Linux. To enable the sample, please add cmake argument cmake .. -DWAYPT2_CORE=ON.
Code work flow
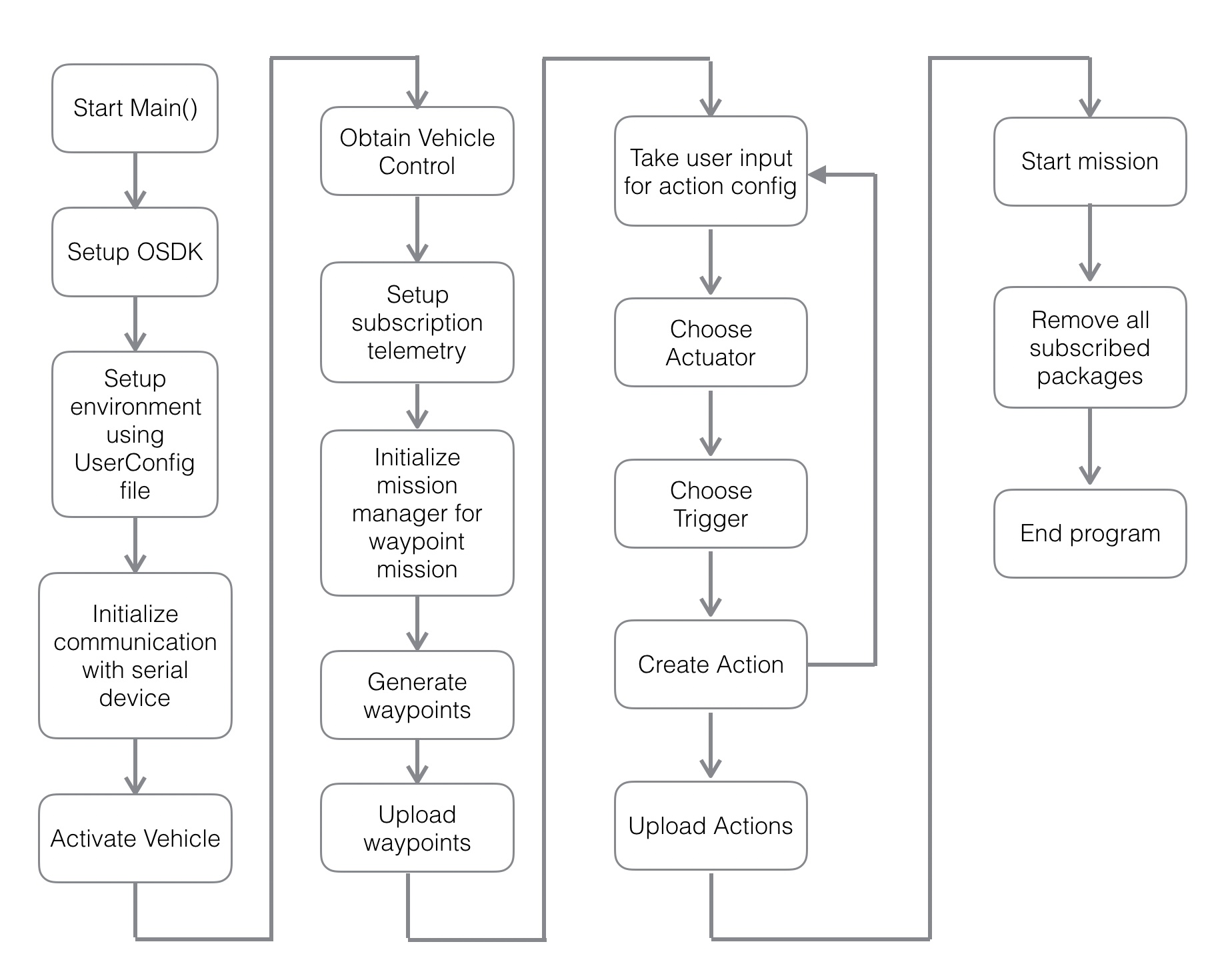
Output
The output of the waypoint mission v2 sample in simulation is shown below:
wayPointPolygonSides = 6Action actuator: Aircraft Control, yaw 180 degAction Trigger: Simple Reach Point at index#2