M210 Onboard Computer Checklist
Mount an Onboard Computer on M210
An example of how to mount a NVIDIA Jetson TX2 on a M210 is shown in the picture below.
Depending on where the onboard computer is mounted, please be aware that the magnetometer interference and upward infrared occlusion could happen. To disable upward infrared obstacle avoidance, please use DJI Go 4 --> Top right option --> Main Controller Setting --> Upward Obstacle Avoidance.

After the physically mounting, developers need to make proper connections between the onboard computer and the M210 following the Hardware Setup.
Software Dependencies for Advanced Sensing
The Advanced Sensing features and the utility to configure the aircraft require additional drivers and libraries to work with OSDK. In order to use them, please make sure the following dependencies are installed.
1. LibUSB
The Stereo Images feature relies on libUSB to receive image data from the aircraft via USB. The recommended version is 1.0.17 and above. Please install libusb with the following command
sudo apt-get install libusb-1.0-0-dev |
In addition to libUSB, an udev file is required to allow your system to obtain permission and to identify DJI USB port.
- Create a udev file called
DJIDevice.rulesinside/etc/udev/rules.d/ - Add
SUBSYSTEM=="usb", ATTRS{idVendor}=="2ca3", MODE="0666"to this file - Reboot your computer
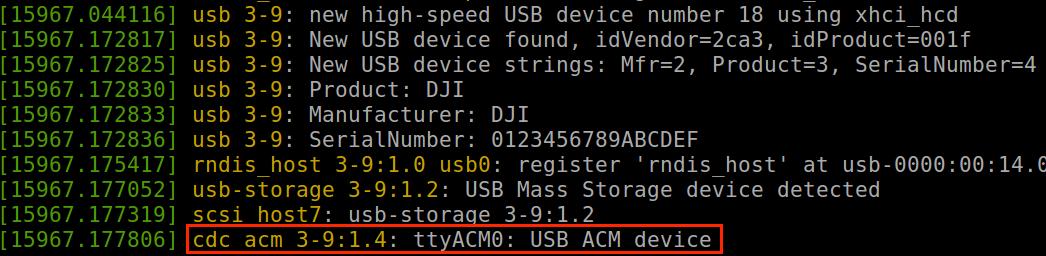
2. USB Abstract Control Model (ACM) Driver
OSDK supports a configuration tool in executable form to allow developers to turn on/off simulation and external power supply and to enable flight when USB is connected to the aircraft. This tool communicates with M210 via USB. In order to use it, please make sure your onboard computer has ACM driver installed. An example of system message from dmesg command in terminal is shown below.
A tutorial on how to build ACM driver on NVIDIA TX2 can be found in this video
3. FFmpeg
The Camera Stream feature of the Advanced Sensing depends on the FFmpeg library. Please install FFmpeg with the following command
sudo apt-get install libavcodec-dev libswresample-dev |
OpenCV (Recommend for running the samples)
The stereo image samples and the camera stream samples use OpenCV to visualize images. Without OpenCV, these samples will just print some message to screen. To get the most from the samples, please install OpenCV with the following command.
sudo apt-get install libopencv-dev |