Porting
NOTE This article is Machine-Translated. If you have any questions about this article, please send an E-mail to DJI, we will correct it in time. DJI appreciates your support and attention.
Port the application developed based on OSDK to the different OS and Platforms, OSDK offered the Hal and Osal layer libs.
NOTE Those sample,use STM3241G-EVAL for example to introduce howe to porting the application in other OS and hardware platforms
Overview
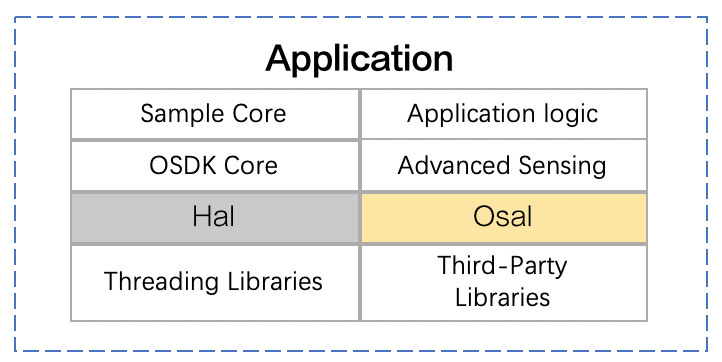
Port the application developed based on OSDK to different OS and Platforms, developer need to adapted the Hal (Hardware Abstraction Layer, hardware interface layer), and the Osal (Operating System Abstraction Layer) ), as shown in Figure 1.
Figure 1.Porting
NOTE
- Applications developed on STM32 using OSDK 4.0 and above must run on FreeRTOS;
- Applications developed on STM32 using OSDK 4.0 or least, can only run on the bare.
Concepts
Hal
Hal (Hardware Abstraction Layer, hardware interface layer) is an OSDK hardware interface abstraction layer, located between the operating system, the application and hardware interface. Developers need to implement and adapt the functions of the Hal layer according to the function prototype in the specified interface Register to the application, so that the application developed based on OSDK can directly access the underlying resources of different computing platform hardware through the Hal layer and communicate with the drone.
-
Don‘t use advanced visual functions When not using advanced vision functions, the onboard computer only needs to communicate with the drone through the UART interface. Developers need to follow the function prototype in the
OsdkPlatform_RegHalUartHandler()to implement and register the function that adapting the Hal to the application. -
Use advanced visual functions When using advanced vision functions, the onboard computer needs to obtain the image data of the drone camera through the USB interface. Developers need to follow the function prototype in the
OsdkPlatform_RegHalUSBBulkHandler()to implement and register the function that fits the Hal layer into the application.
Osal
Osal (Operating System Abstraction Layer) is an OSDK operating system abstraction layer, located between the application and the operating system. Developers need to follow the function prototype in the PsdkPlatform_RegOsalHandler() interface to implement and register the functions that adapt the Osal layer to the application, so that applications developed based on OSDK can directly access the operating system and operating system kernel resources through the Osal layer To port applications to different operating systems.
Thread
To use the thread mechanism to manage the application to perform the corresponding tasks, developers need to implement the functions of creating threads, destroying threads, and thread sleep.
- Create thread:
E_OsdkStat (*TaskCreate)(T_OsdkTaskHandle *task, |
- Destruction thread:
E_OsdkStat (*TaskDestroy)(T_OsdkTaskHandle task) - Thread sleep:
E_OsdkStat (*TaskSleepMs)(uint32_t timeMs)
Mutex
Mutex is a mechanism used to prevent multiple threads from reading and writing to common resources (such as shared memory, etc.) on the same queue, counter, and interrupt handler at the same time. Use the mutex mechanism to manage the payload control program,developer needs to develop functions such as the mutex create, mutex destroys, mutex lock, and unlock.
- Mutex Create:
E_OsdkStat (*MutexCreate)(T_OsdkMutexHandle *mutex) - Mutex Destroy:
E_OsdkStat (*MutexDestroy)(T_OsdkMutexHandle mutex) - Mutex Lock:
E_OsdkStat (*MutexLock)(T_OsdkMutexHandle mutex) - Mutex Unlock:
E_OsdkStat (*MutexUnlock)(T_OsdkMutexHandle mutex);
Semaphore
The semaphore is a mechanism that prevents multiple threads from operating on the same code segment at the same time. Use the semaphore mechanism to manage the payload control program, the developer needs to develop functions such as semaphores creat, semaphores destroy, semaphores wait, semaphores timed wait and semaphores post.
-
Semaphore Create:
E_OsdkStat (*SemaphoreCreate)(T_OsdkSemHandle *semaphore, uint32_t initValue)NOTE When using this interface, please set the initial value of the
initValuesemaphore. -
Semaphore Destroy :
E_OsdkStat OsdkOsal_SemaphoreDestroy (T_OsdkSemHandle semaphore) -
Semaphore Wait:
E_OsdkStat OsdkOsal_SemaphoreWait (T_OsdkSemHandle semaphore);NOTE The maximum value of the wait time for the semaphore interface is 32767 ms.
-
Semaphore Timeout :
E_OsdkStat OsdkOsal_SemaphoreTimedWait (T_OsdkSemHandle semaphore, uint32_t waitTimeMs) -
Semaphore Post:
E_OsdkStat OsdkOsal_SemaphorePost (T_OsdkSemHandle semaphore)
System Time
Get the time of the system (ms):E_OsdkStat OsdkOsal_GetTimeMs(uint32_t *ms);
Memory Management
- Apply:
void *OsdkOsal_Malloc(uint32_t size); - Free:
void OsdkOsal_Free(void *ptr)
Develop With The Porting
1. Initialization
After creating the project file, please call the following interface to register the interface functions of the hardware platform and operating system to the application developed based on OSDK, otherwise the application developed using OSDK will not be portable to other hardware platforms And on the operating system.
E_OsdkStat OsdkPlatform_RegOsalHandler(const T_OsdkOsalHandler *osalHandler); |
2. Load Files
Hal
- Linux/ROS:osdkhal_linux.c
- STM32F4:osdkhal_stm32.c
Osal
- Linux/ROS:osdkosal_linux.c
- STM32F4:osdkosal_stm32.c
3. Register The Port Module
Hal
#ifdef ADVANCED_SENSING |
Osal
if(DJI_REG_OSAL_HANDLER(&osalHandler) != true) { |
FreeRTOS
To port applications developed based on OSDK to the FreeRTOS platform, you need to obtain the kernel source code of FreeRTOS first.
1. Get The Porting Code
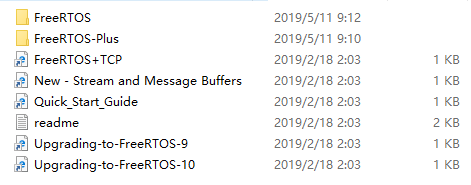
- Download and unzip the FreeRTOS compressed package V10.2.1, the main directory after the code is decompressed is shown below.
Figure 2.FreeRTOS Main Directory
- Key files
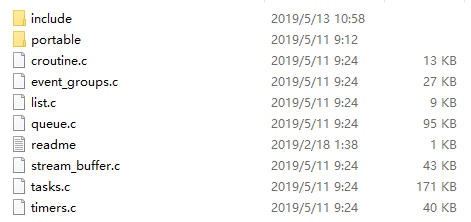
- Porting FreeRTOS core code
Copy all files under/FreeRTOS/Source/toonboard-sdk/sample/platform/STM32/OnBoardSDK_STM32/OS/FreeRTOS/.
- Porting FreeRTOS core code
Figure 3. FreeRTOS Porting Files
- Copy the configuration files
copy theFreeRTOSConfig.hfile in/FreeRTOS/Demo/CORTEX_M4F_STM32F407ZG-SK/toonboard-sdk/sample/platform/STM32/OnBoardSDK_STM32/OS/FreeRTOS/includedirectory.
The file location ofFreeRTOSConfig.h:
Figure 4. FreeRTOS Config File
2. Modify Key Config Information
Modify key information in FreeRTOSConfig.h
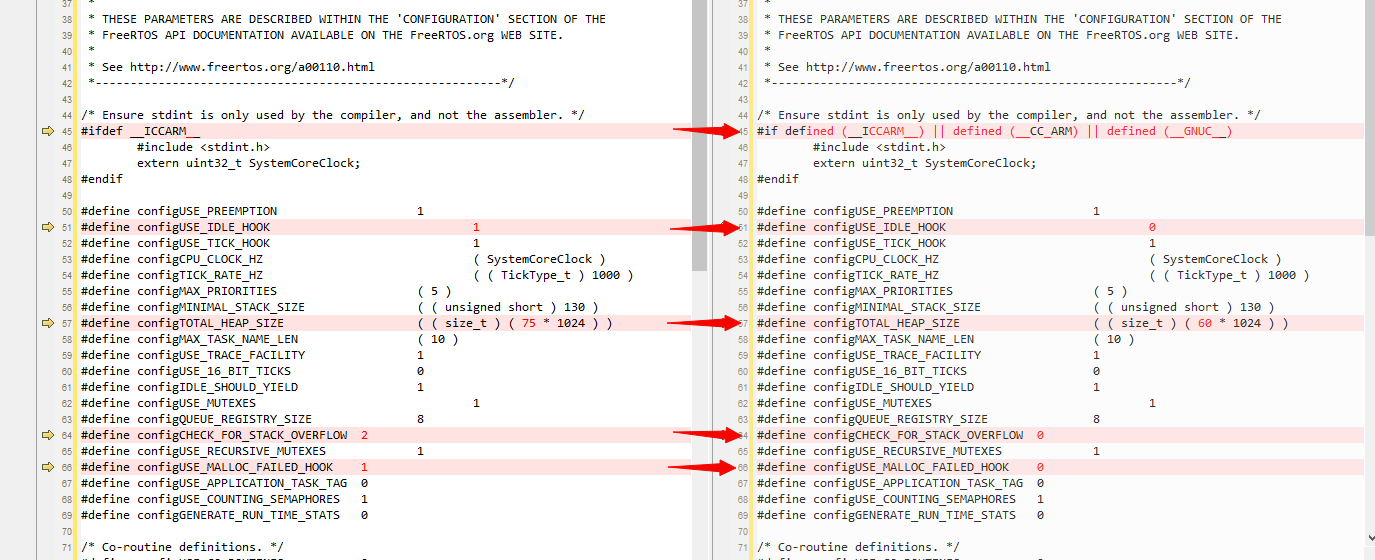
- Change
#ifdef __ICCARM__to#if defined (__ICCARM__) || defined (__CC_ARM) || defined (__GNUC__) - Change
#defined configUSE_IDLE_HOOK 1to#defined configUSE_IDLE_HOOK 2 - Change
#define configTOTAL_HEAP_SIZE ((size_t)(75*1024))to#define configTOTAL_HEAP_SIZE ((size_t)(60*1024)) - Change
#define configCHECK_FOR_STACK_OVERFLOW 2to#define configCHECK_FOR_STACK_OVERFLOW 0 - Change
#define configUSE_MALLOC_FAILED_HOOK 1to#define configUSE_MALLOC_FAILED_HOOK 0
The comparison of the FreeRTOSConfig.h is as below:
Figure 5. Modification Comparison