Ground Station Programming Guide
This file is a simple roadmap of how to implement groudstation tasks, i.e. the waypoint task, the hotpoint task and the follow me task.
Waypoint Task
Waypoint is an important subset of groundstation functions. With the help of waypoint API, developers can make drone fly throught a given group of GPS coordinates.
How to use
- Init the Waypoint Task.
Before starting the waypoint task, developers should upload the coordinates information. There are two parts of uploading in waypoint logic, upload the required information of the whole task at first, then upload every waypoint data within this task. Developers can start the waypoint task if and only if both of the task and they waypoint details are uploaded.
To upload the task information, developers should initialize the following struct:
typedef struct WayPointInitData |
- Upload Waypoint Data.
After a succesfful update waypoint task, developers should updload the detail of every waypoint in this task one by one, with its corresponding index. Other than the basic parameters of waypoint, it is also possible to set actions when reaching the waypoint.
typedef struct WayPointData |
- Start Waypoint Task
Developers can start the waypoint task after the previous two steps.
- Other Waypoint APIs
There are severl other waypoint APIs developers can make use of, such as pause, resume and stop the task. Developers can also set and read the idle speed as well as the maximum speed.
Please refer to the Ground Station Protocol for detail.
Hotpoint Task
Hotpoint is a functionality that allows the drone to circle around a given point of interest with certain radius. Developers can
- Init and Start Hotpoint Task
Unlike waypoint task, the drone will execute hotpoint task immediately after the initialization step has been finished.
To initialize the hotpoint task, developers should set the coordinate of point of interest, as well as the radius, velocity and several other parameters, then upload them.
typedef struct HotPointData |
- Other Hotpoint APIs
There are severl other hotpoint APIs developers can make use of, such as pause, resume and stop the task. Developers can also set and read the idle speed as well as the radius.
Please refer to the Ground Station Protocol for detail.
Follow Me Task
Follow me allows your drone to follow the movement of target by itself. However, developers should update the target position and send it to drone in order to achieve the follow me movement.
- Init and Start Follow Me Task
Similar to hotpoint, follow me task will start immediately after the initialization step.
To initialize the follow me task, developers should set the target position at first.
typedef struct FollowData |
- Update Target Position
After starting the follow me task, developers should keep telling the current position of target. i.e. update the position of target. Otherwise the drone will hover in the current position because it believes the target doesn't move.
typedef struct FollowTarget |
- Other Follow Me APIs
There are severl other follow me APIs developers can make use of, such as pause, resume and stop the task.
Please refer to the Ground Station Protocol for detail.
The Status Push Information and Event Push Information
There is a broadcast of flight data in firmware 2.3. In 3.1, we add a similar protocol to push groundstation status and events.
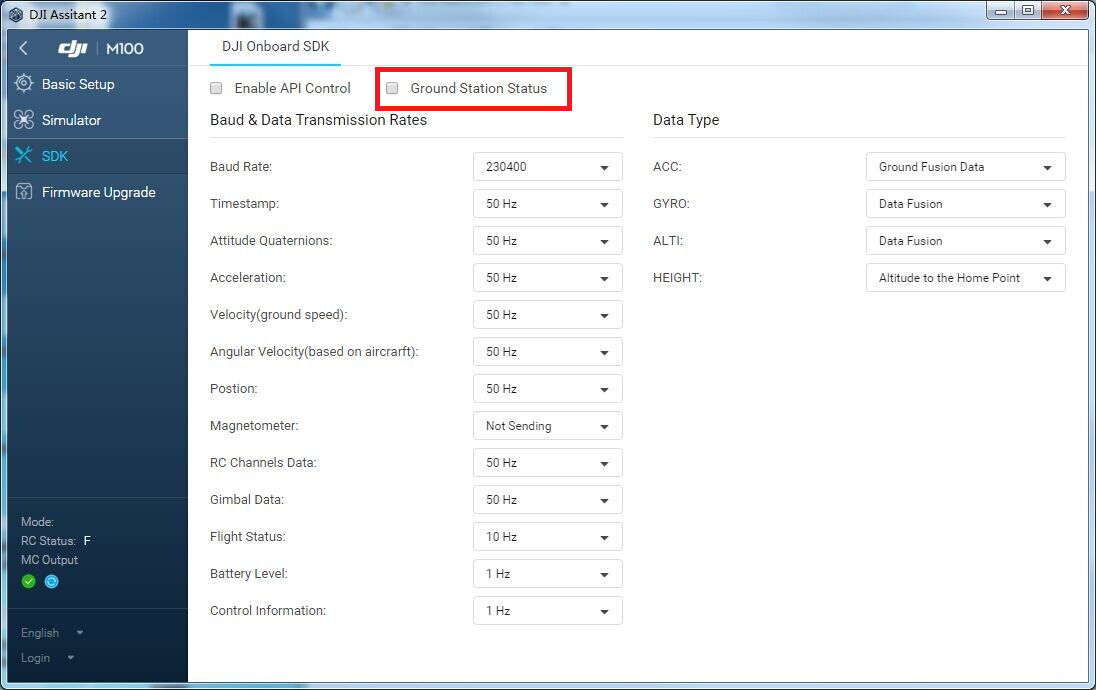
Note: Developers should select the Ground Station Status checkbox in DJI Assistant in order to receive the pushed info.
- Status Push Information
The status information takes up CMD SET 0x02 with CMD ID 0x03.
There are four kinds of status corresponding to the task types, waypoint, hotpoint, follow me and non of above.
Please refer to the Ground Station Protocol for detail.
- Event Push Information
The event push information takes up CMD SET 0x02 with CMD ID 0x04 and it is specifically designed for waypoint task.
There are three events included in the push info, data uploaded, task finished and waypoint reached.
Please refer to the Ground Station Protocol for detail.