跨平台移植
基于OSDK 开发的应用程序能够运行在Linux 和ROS 系统上,为满足开发者在不同的操作系统和开发平台上使用OSDK 开发应用程序,OSDK 提供了Hal 层和Osal 层库。
说明: 本教程提供的示例代码,是以STM3241G-EVAL 开发板为例,介绍将基于OSDK 开发的应用程序移植到FreeRTOS 平台上的步骤。
概述
为能使基于OSDK 开发的应用程序移植到不同的软硬件平台,需要通过Hal(Hardware Abstraction Layer,硬件接口层)适配不同的硬件平台,通过Osal(Operating System Abstraction Layer,操作系统抽象层)实现与不同操作系统的兼容,如 图1.代码移植 所示。
图1.代码移植

说明
- 使用OSDK 4.0 及以上版本,在STM32上开发的应用程序必须运行在FreeRTOS上;
- 使用OSDK 4.0 以下版本,在STM32上开发的应用程序仅能运行在裸机上。
基础概念
Hal 层
Hal(Hardware Abstraction Layer,硬件接口层)是OSDK 硬件接口抽象层,位于操作系统、应用程序和硬件接口间,开发者需要按照指定接口中的函数原型,实现并将适配Hal 层的函数注册到应用程序中,使基于OSDK 开发的应用程序通过Hal 层直接访问不同计算平台硬件的底层资源,并与无人机通信。
-
不使用高级视觉功能
不使用高级视觉功能时,机载计算机仅需通过UART 接口与无人机通信。开发者需要按照OsdkPlatform_RegHalUartHandler()接口中的函数原型,实现并将适配Hal 层的函数注册到应用程序中。 -
使用高级视觉功能 使用高级视觉功能时,机载计算机需通过USB 接口获取无人机摄像头的图像数据。开发者需要按照
OsdkPlatform_RegHalUSBBulkHandler()接口中的函数原型,实现并将适配Hal 层的函数注册到应用程序中。
Osal 层
Osal(Operating System Abstraction Layer,操作系统抽象层)是OSDK 的操作系统抽象层,位于应用程序和操作系统间。开发者需要按照PsdkPlatform_RegOsalHandler()接口中的函数原型,实现并将适配Osal 层的函数注册到应用程序中,使基于OSDK 开发的应用程序通过Osal 层直接访问操作系统以及操作系统内核的资源,将应用程序移植到不同的操作系统上。
线程函数
使用线程机制管理应用程序执行相应的任务,开发者需要实现创建线程、销毁线程和线程睡眠的函数。
- 创建线程:
E_OsdkStat (*TaskCreate)(T_OsdkTaskHandle *task, |
- 销毁线程:
E_OsdkStat (*TaskDestroy)(T_OsdkTaskHandle task) - 线程睡眠:
E_OsdkStat (*TaskSleepMs)(uint32_t timeMs)
互斥锁
互斥锁是一种用于防止多个线程同时对同一队列、计数器和中断处理程序等公共资源(如共享内存等)执行读写操作的机制,能够有效避免进程死锁或长时间的等待。使用互斥锁机制,需要开发者实现创建互斥锁、销毁互斥锁、互斥锁上锁和互斥锁解锁。
- 创建互斥锁:
E_OsdkStat (*MutexCreate)(T_OsdkMutexHandle *mutex) - 销毁互斥锁:
E_OsdkStat (*MutexDestroy)(T_OsdkMutexHandle mutex) - 互斥锁上锁:
E_OsdkStat (*MutexLock)(T_OsdkMutexHandle mutex) - 互斥锁解锁:
E_OsdkStat (*MutexUnlock)(T_OsdkMutexHandle mutex);
信号量
信号量是一种用于防止多线程同时操作相同代码段的机制。开发者使用该机制时,需要实现创建信号量、销毁信号量、等待信号量、释放信号量和等待超时信号量函数。
-
创建信号量:
E_OsdkStat (*SemaphoreCreate)(T_OsdkSemHandle *semaphore, uint32_t initValue)说明: 使用该接口时,请设置
initValue信号量的初始值。 -
销毁信号量:
E_OsdkStat OsdkOsal_SemaphoreDestroy(T_OsdkSemHandle semaphore) -
等待信号量:
E_OsdkStat OsdkOsal_SemaphoreWait(T_OsdkSemHandle semaphore);说明: 等待信号量接口等待时间的最大值为32767 ms。
-
等待超时信号量:
E_OsdkStat OsdkOsal_SemaphoreTimedWait(T_OsdkSemHandle semaphore, uint32_t waitTimeMs) -
释放信号量:
E_OsdkStat OsdkOsal_SemaphorePost(T_OsdkSemHandle semaphore)
时间接口
获取当前系统的时间(ms):E_OsdkStat OsdkOsal_GetTimeMs(uint32_t *ms);
内存管理接口
- 申请内存:
void *OsdkOsal_Malloc(uint32_t size); - 释放内存:
void OsdkOsal_Free(void *ptr)
实现跨平台移植
1. 跨平台移植模块初始化
创建工程文件后,请先调用如下接口,将硬件平台和操作系统的接口函数注册到基于OSDK 开发的应用程序中,否则使用OSDK 开发的应用程序将无法移植到其他硬件平台和操作系统上。
E_OsdkStat OsdkPlatform_RegOsalHandler(const T_OsdkOsalHandler *osalHandler); |
2. 引用关键文件
Hal 层适配
- Linux / ROS:osdkhal_linux.c
- STM32F4:osdkhal_stm32.c
Osal 层适配
- Linux / ROS:osdkosal_linux.c
- STM32F4:osdkosal_stm32.c
3. 注册跨平台移植模块
注册Hal 层函数
#ifdef ADVANCED_SENSING |
注册Osal 层函数
if(DJI_REG_OSAL_HANDLER(&osalHandler) != true) { |
FreeRTOS 移植
将基于OSDK 开发的应用程序移植到FreeRTOS 平台上,需要先获取FreeRTOS 的内核源码。
1. 获取移植代码
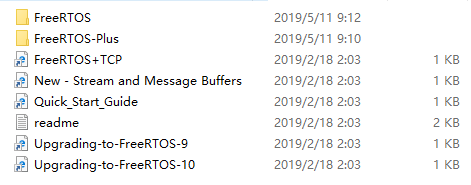
- 下载并解压缩FreeRTOS 压缩包 V10.2.1,代码解压后主目录如 图2.FreeRTOS 文件列表 所示:
图2.FreeRTOS 文件列表
- 关键文件移植
- 移植FreeRTOS 核心代码: 将
/FreeRTOS/Source/下的所有文件复制到onboard-sdk/sample/platform/STM32/OnBoardSDK_STM32/OS/FreeRTOS/目录下。
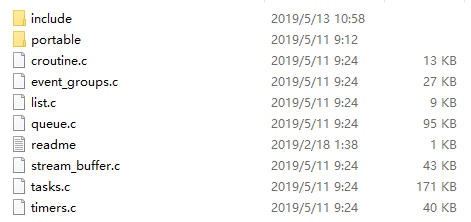
- 移植FreeRTOS 核心代码: 将
图3.FreeRTOS 关键文件列表
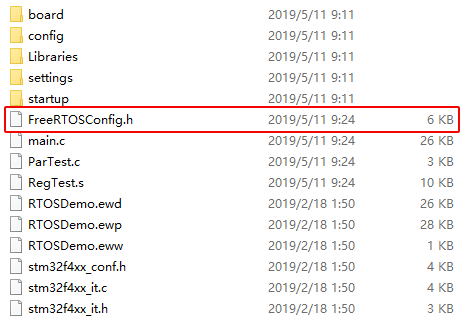
- 移植关键配置文件:将
/FreeRTOS/Demo/CORTEX_M4F_STM32F407ZG-SK/中的文件FreeRTOSConfig.h复制到onboard-sdk/sample/platform/STM32/OnBoardSDK_STM32/OS/FreeRTOS/include目录下。
图4.FreeRTOSConfig.h 文件
2. 修改关键配置信息
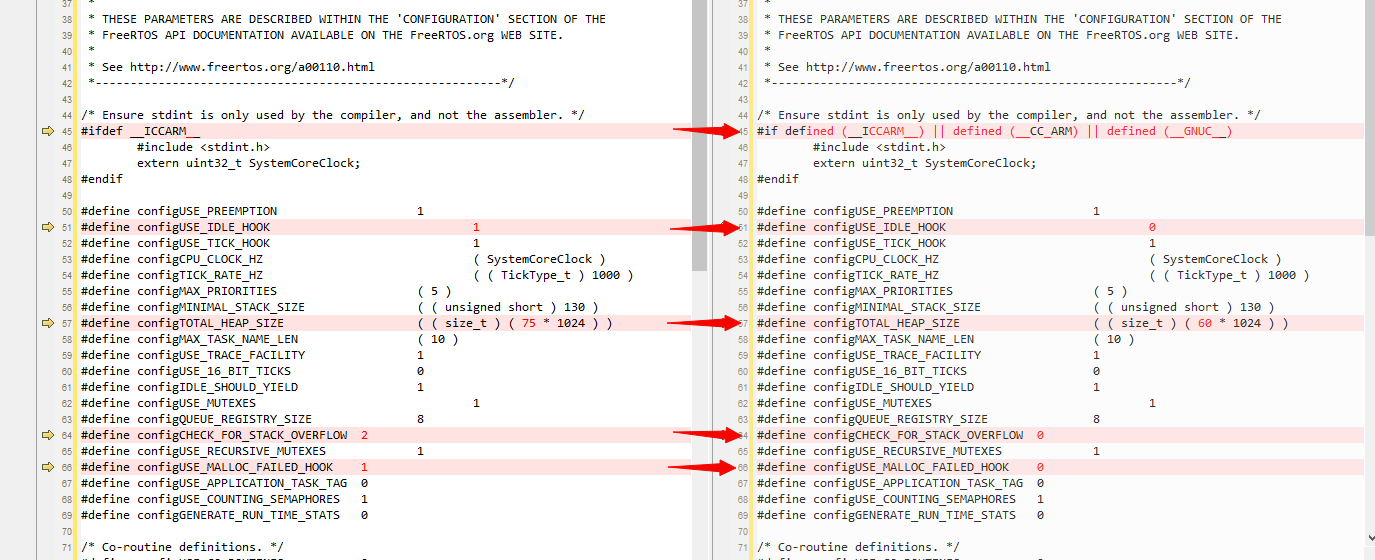
修改FreeRTOSConfig.h 文件中的关键信息。
- 将
#ifdef __ICCARM__改为#if defined (__ICCARM__) || defined (__CC_ARM) || defined (__GNUC__) - 将
#defined configUSE_IDLE_HOOK 1改为#defined configUSE_IDLE_HOOK 2 - 将
#define configTOTAL_HEAP_SIZE ((size_t)(75*1024))改为#define configTOTAL_HEAP_SIZE ((size_t)(60*1024)) - 将
#define configCHECK_FOR_STACK_OVERFLOW 2改为#define configCHECK_FOR_STACK_OVERFLOW 0 - 将
#define configUSE_MALLOC_FAILED_HOOK 1改为#define configUSE_MALLOC_FAILED_HOOK 0
图5.修改配置对比